Medtec上海展关注到,在狭窄、迂曲的体内腔道(如脑血管、支气管或输卵管)中进行精准手术,对介入器械提出了极高要求——既要柔软灵活以安全导航,又需足够刚硬以稳定推进并执行活检或给药等操作。然而,现有微导管普遍缺乏一种无创、可集成且能动态调节刚度的策略,难以兼顾这两种看似矛盾的机械性能。

近日,中国科学院深圳先进技术研究院徐海峰研究员团队联合山西北方大学、中山大学(深圳)等单位,在《自然·通讯》(Nature Communications)发表了一项突破性研究成果。他们开发出一种名为“Helixoft”的螺旋形磁性软体微机器人系统,可无缝集成于商用微导管(直径小至300微米),仅通过外部磁场即可实现连续可调的刚度变化(最高达40倍)和任意方向的主动转向,且无需热、电或光等可能损伤组织的刺激。
该系统的核心创新在于其“材料磁化–结构设计–磁场模式”三位一体的解耦控制策略:微机器人由刚性磁性螺旋与柔性硅胶微管组成。旋转磁场驱动螺旋沿微管做螺杆式运动,动态覆盖不同长度的柔性段,从而连续调节整体刚度;而静态磁场则独立控制导管末端的磁性头端,实现精确弯曲转向。二者互不干扰,使微导管能在“高刚度-稳定推进”、“低刚度-大角度转向”和“中等刚度-平衡操作”三种状态间自由切换。
研究团队通过力学模型精准预测导管姿态,并在多种场景中验证了系统的卓越性能:在仿生血管模型中,它成功完成复杂分叉路径导航、靶向活检与精准药物递送;在活体猪肺实验中,系统在X光与微型摄像头双重引导下,顺利抵达第四级支气管(直径约2毫米),并完成25微升抗癌药物的定点注射,术后动物无炎症或黏膜损伤;在离体猪输卵管模型中,它更展示了在高摩擦、多褶皱的真实组织环境中,通过刚度编程实现安全转弯与局部活检的能力。
该“Helixoft”系统不仅尺寸微小、生物相容性好,还具备开放架构,可集成微型相机、电极或激光光纤等工具,为未来在肺部、脑血管及生殖系统等敏感腔道中开展智能、精准、微创的诊疗操作提供了通用平台。这项研究标志着磁控软体机器人在临床转化道路上迈出关键一步,有望革新下一代介入医疗器械的设计范式。
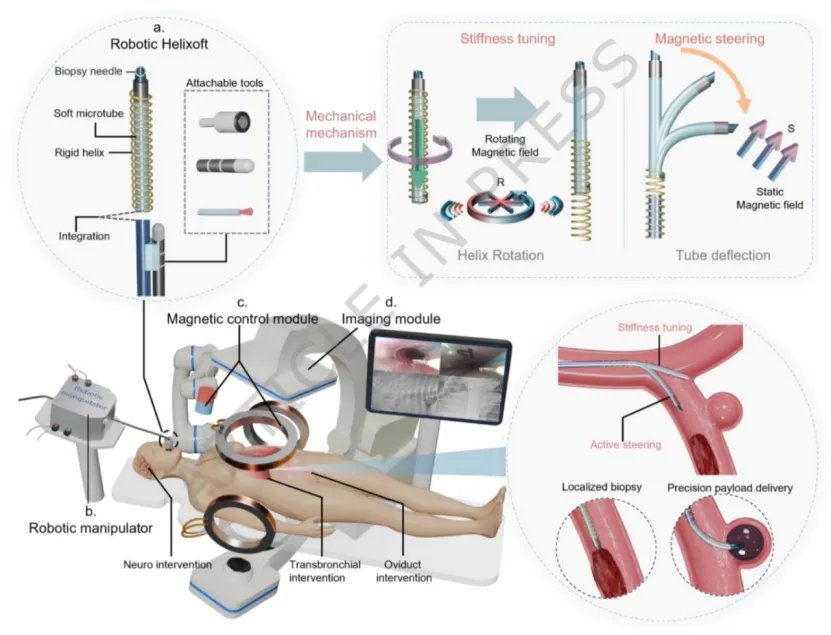
图1:Helixoft微机器人系统在介入手术中实现微导管刚度调节与主动转向的概念示意图。
该系统由四大模块组成:(a) Helixoft微机器人;(b) 导管机器人操纵器;(c) 磁控模块,包含电磁线圈及安装在机械臂上的永磁体;(d) 成像模块,基于C型臂计算机断层扫描(C-arm CT)和内窥镜微型摄像头。Helixoft微机器人可便捷地装载于商用微导管上,并可同时集成多种微型手术工具(如微型摄像头、电极和光纤)。其刚度调节通过外部磁场控制刚性螺旋部件的螺旋运动实现——该螺旋结构可动态缠绕或展开于柔性微管段,从而连续改变整体刚度。与此同时,静态磁场用于控制微导管的主动转向,而导管的轴向推进则由机器人操纵器精确操控。图中,R代表旋转磁场,S代表静态磁场;紫色弯曲箭头表示螺旋的旋转方向,绿色箭头表示其平移运动方向;红–蓝渐变的环形箭头代表旋转磁场,红–蓝渐变的直线箭头代表静态磁场;橙色箭头指示导管的偏转方向。解剖结构(肺、脑、子宫)素材改编自Freepik(免费授权)。
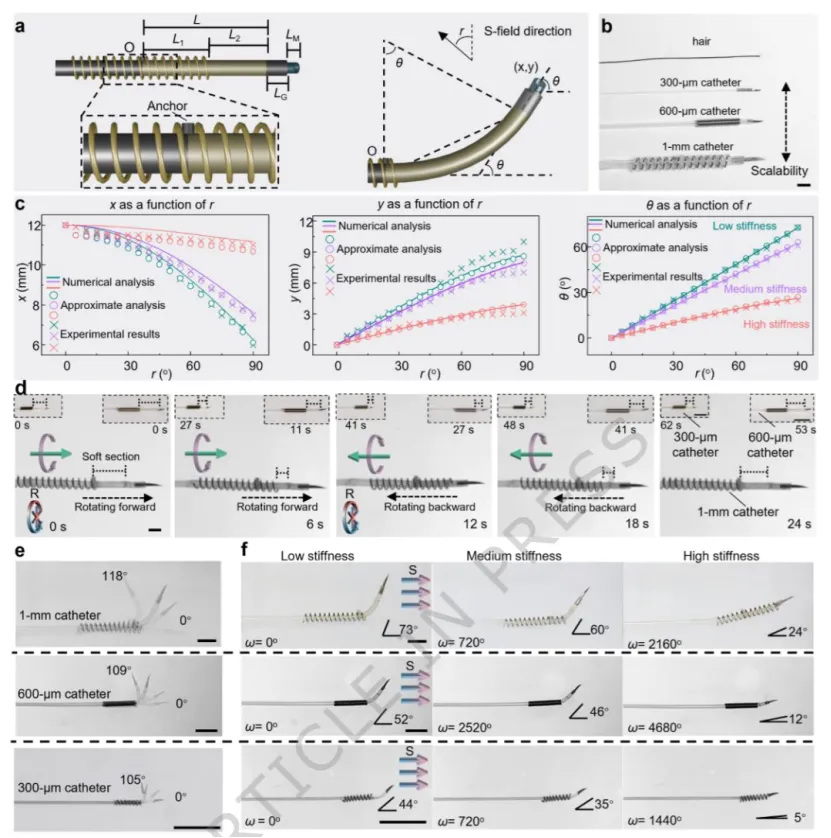
图2:Helixoft集成微导管的建模与表征。
(a) 微导管示意图,左侧展示关键几何参数,右侧为恒定曲率力学模型。(b) 三种不同刚度调节范围的Helixoft微机器人,分别集成于直径为300 μm(最细)、600 μm(刚度调节范围最大)和1 mm(调节精度最高)的代表性商用微导管上。(c) 在特定旋转磁场(R场)与静态磁场(S场)条件下,微导管末端位姿(x, y, θ)的近似解析解、数值模拟结果与实验测量值的对比;n = 3次重复实验。(d) 在R场驱动下,刚性磁性螺旋通过类螺杆式螺旋运动实现微导管刚度调节的动态过程序列;黑色箭头表示刚性螺旋的平移方向。(e) 三根处于低刚度状态的微导管在S场作用下的转向行为时序图像。(f) 微导管在高、中、低三种刚度状态下,通过末端磁头在S场中的磁对齐实现主动转向的动态序列。比例尺:(b) 和 (d) 为2 mm;(e) 和 (f) 为4 mm。
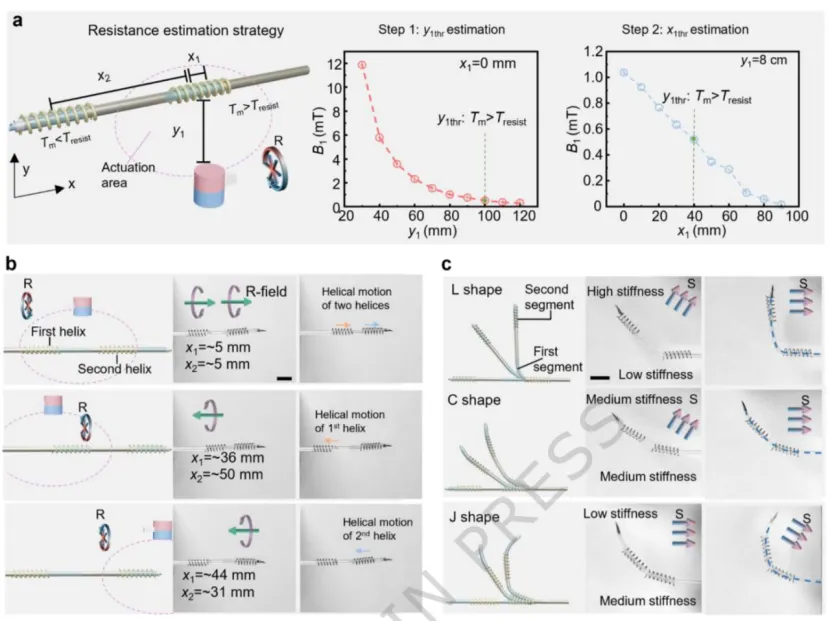
图3:基于双段式刚度调节模块的分布式刚度控制。
(a) 通过估算阻力矩实现两个螺旋独立驱动的策略;误差线表示标准差(n = 3次重复实验,数据以均值±标准差表示);粉色圆圈标示驱动区域,即当施加的磁驱动扭矩 \( T_m \) 大于局部阻力矩 \( T_{\text{resist}} \) 时(\( T_m > T_{\text{resist}} \)),螺旋开始运动。(b) 单根微导管上两个螺旋的独立控制:橙色与蓝色箭头分别表示第一段和第二段螺旋的运动方向。(c) 通过独立调节两段刚度,微导管在静态磁场下可实现多种弯曲构型,包括C形、L形和J形;蓝色曲线表示微导管的实际形状。比例尺:5 mm。
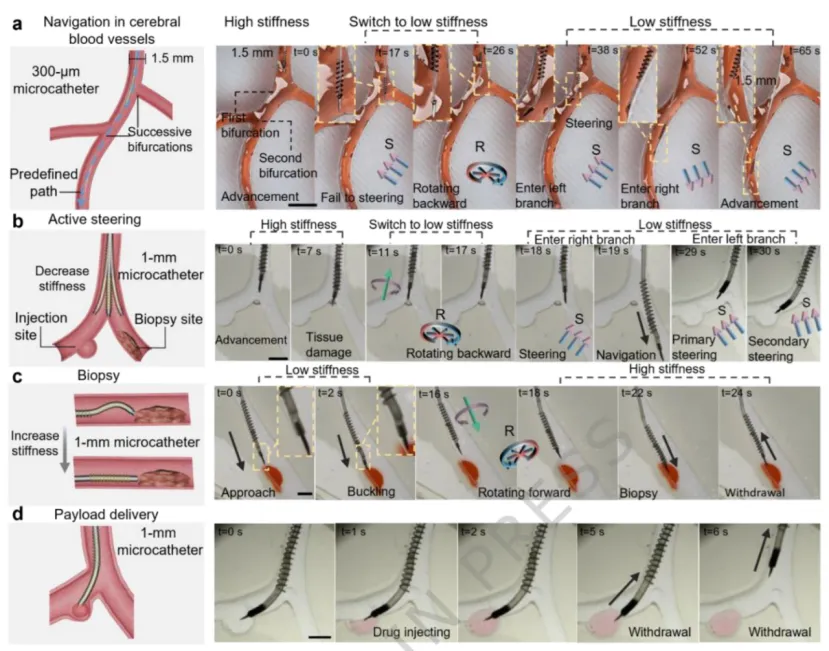
图4:Helixoft集成微导管在水凝胶仿体中实现转向、活检与药物递送的功能演示。
(a) 在狭窄迂曲的血管仿体中完成路径导航,蓝色线条标示预设行进轨迹。(b) 在颈动脉分叉仿体中执行主动转向操作:右支设有模拟病灶(用于活检),左支设有模拟动脉瘤(用于药物递送);黑色箭头指示导管推进或回撤方向。(c) 通过程序化刚度调节,在右支成功完成局部活检——导管先以低刚度状态转向进入目标分支,再切换至高刚度状态实现组织穿刺。(d) 在左支精准完成药物递送,展示系统在复杂腔道内定点释放载荷的能力。比例尺:4 mm。
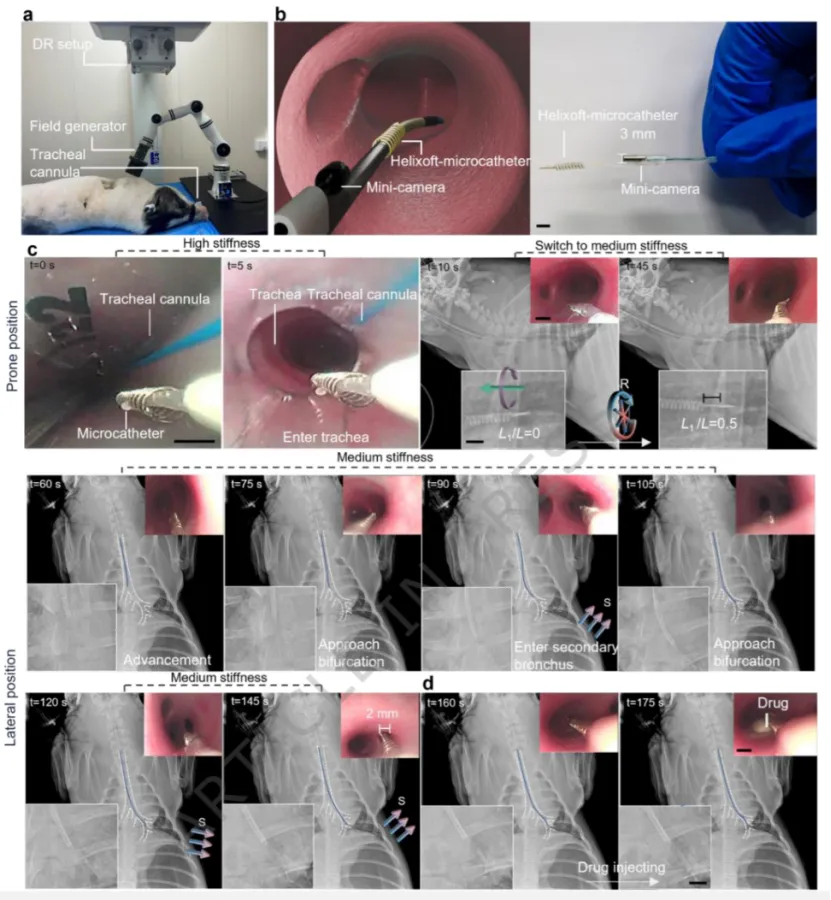
图5:在活体猪第四级支气管中,基于影像引导的Helixoft集成微导管导航与精准药物递送。
(a) 手术系统配置:包括数字X线摄影(DR)成像设备和安装于六自由度机械臂上的磁场发生器。(b) 集成微型摄像头的Helixoft微导管示意图(左)与实物照片(右),用于腔内实时可视化。(c) 在X射线引导下,微导管通过多阶段主动转向,成功穿越各级支气管分叉,抵达深部目标区域。(d) 微导管在第四级支气管内完成精准药物注射;左下角插图为放大后的X射线图像,右上角插图为导管搭载的微型摄像头所捕获的实时腔内影像。图中蓝色轨迹表示微导管路径,白色虚线勾勒出支气管轮廓。比例尺:(b) 为4 mm;(c) 和 (d) 为3 mm。
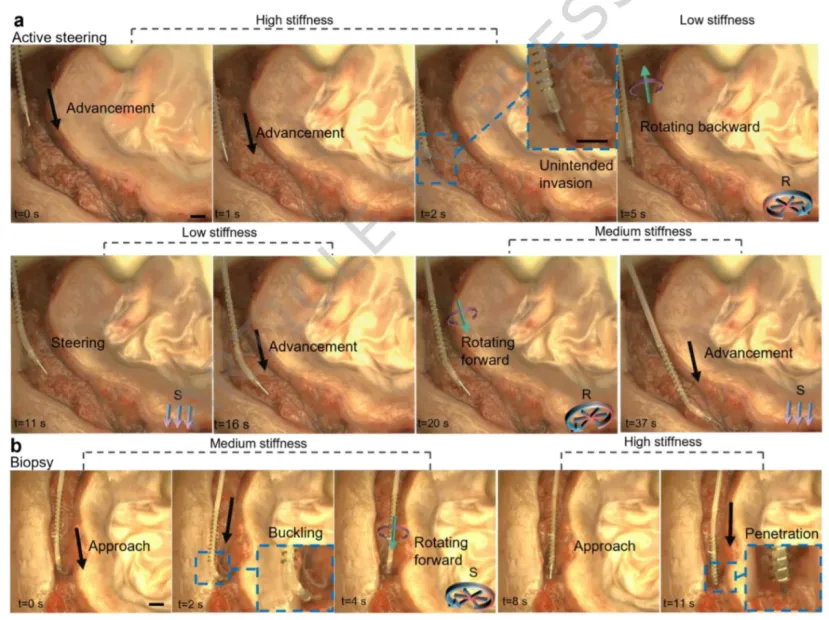
图6:Helixoft集成微导管在离体猪输卵管中进行局部活检的演示。
(a) 主动转向过程:在高刚度状态下,微导管沿输卵管推进,但在拐角处因缺乏柔性而意外侵入健康组织(0–2秒);随后,在旋转磁场(R场)作用下切换至低刚度状态,并在静态磁场(S场)驱动下实现磁控转向,顺利绕过弯道(2–16秒);最后,调整为中等刚度状态,以约25°的稳定弯曲角继续推进通过拐角区域(16–37秒)。(b) 局部活检过程:在中等刚度状态下,微导管接触目标组织时发生屈曲,无法有效穿刺(0–2秒);随后切换回高刚度状态(4–8秒),成功穿透目标组织完成活检(11秒)。图中黑色箭头指示导管推进方向。比例尺:3 mm。
文章来源:TruthMed
文章内容仅供知识交流分享使用,如涉侵权请联系我们删除